02 · Builds
PROJECTS
06 Entries · Sorted by Complexity
001
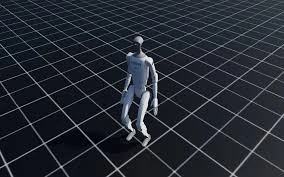
Humanoid Reinforcement Learning
Robot Boxer
Trained a Unitree G1 humanoid to throw punches in IsaacLab, comparing a pure-PPO policy against an AMP-regularized policy trained with motion-capture priors via a learned discriminator.
002
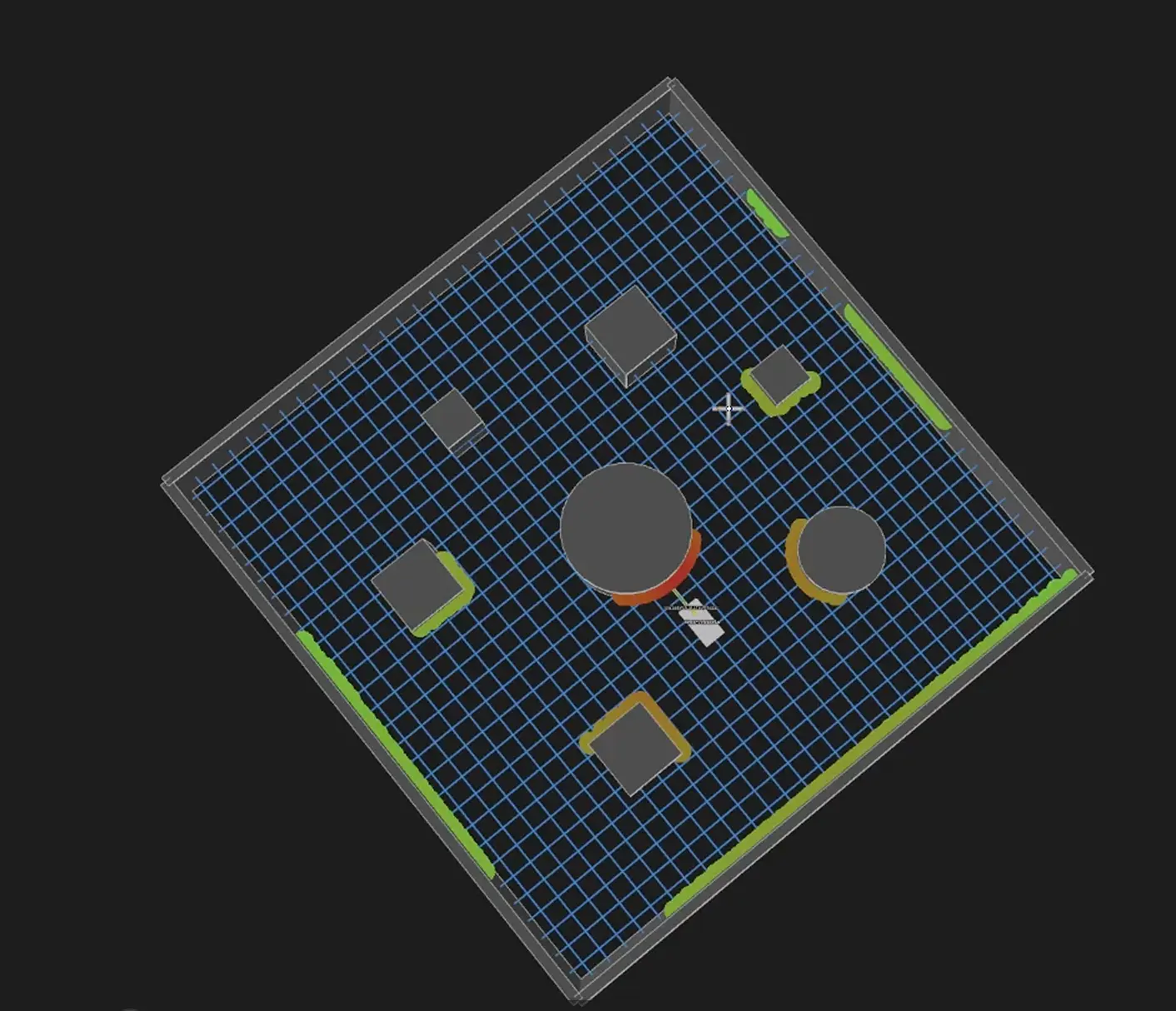
Autonomous Navigation
Robot Racer
Autonomous navigation for a LiDAR-equipped robot. A* pathfinding and Pure Pursuit control in C++. Deployed via ROS2 and Docker, simulated in Foxglove.
003
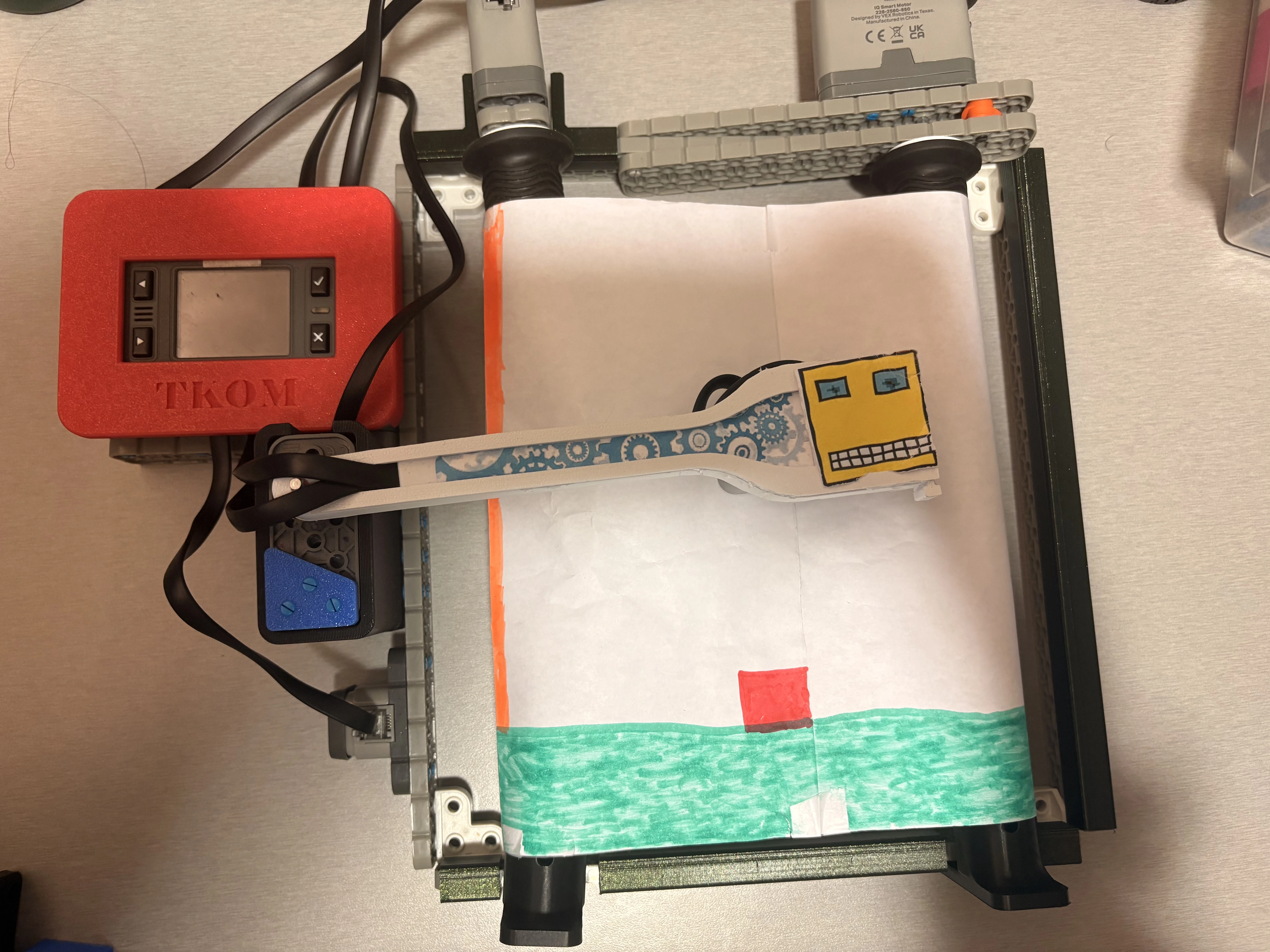
Hardware + Software
TKOM Robot
Robot that converts user-drawn maps into a personalised video game. Gravity physics and linear algebra in C++. Hardware designed in SolidWorks, printed on Bambu P1S.
004
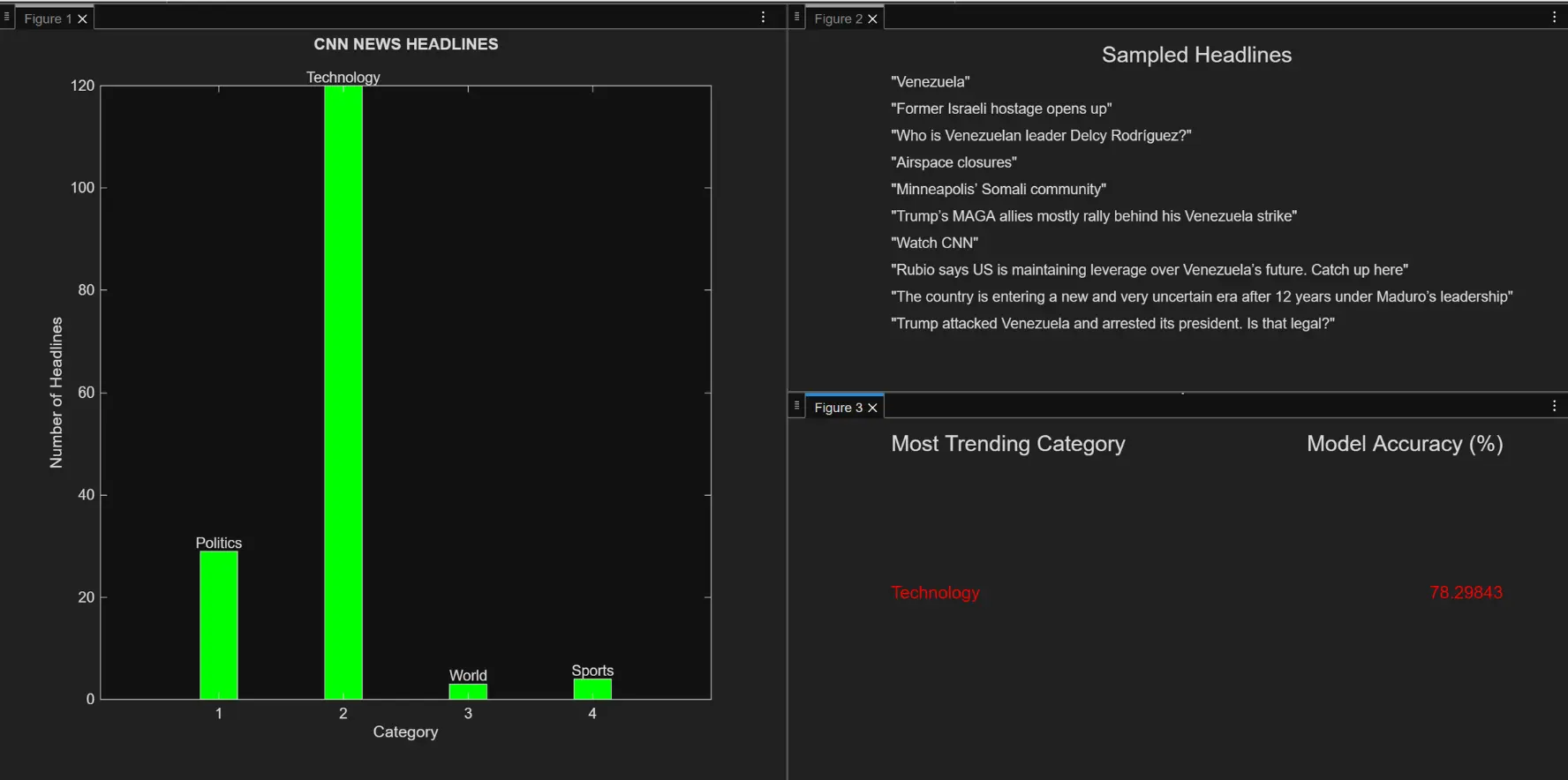
ML + Data Pipeline
CNN Headline Scraper
Python pipeline scraping CNN headlines to identify emerging trends. TF-IDF and logistic regression for classification. Statistical analysis in MATLAB — 79% accuracy.
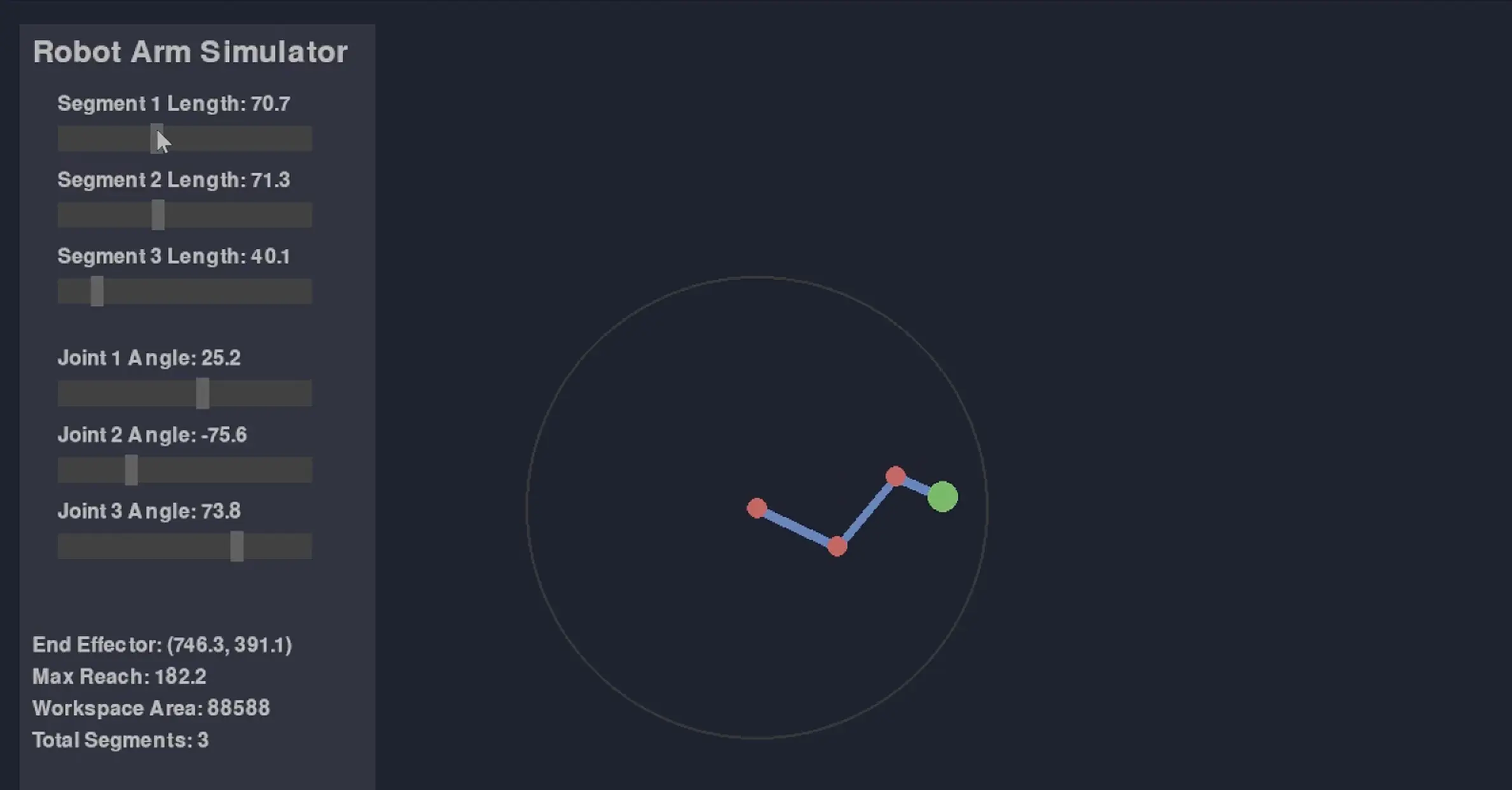
005
Simulation
Robotic Arm Simulator
Python app simulating forward and inverse kinematics for arbitrary arm configurations. NumPy for linear algebra, PyGame for real-time visualisation. Cut testing time by 91%.
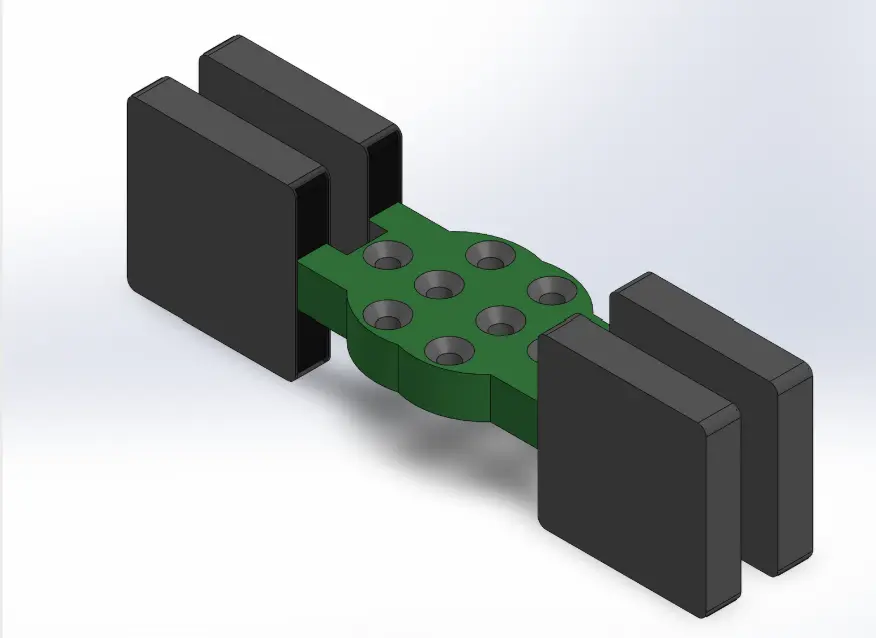
006
Hardware Design
Outdoor Faucet Grip
Custom ergonomic grip attachment for outdoor water faucets, designed for accessibility and ease of use. Modelled in CAD and fabricated via 3D printing.
Current Build
THE HAND
An autonomous 6DOF robotic arm that lets people with motor disabilities play physical chess through voice control and computer vision — fully hands-free. Built from scratch: SolidWorks CAD, custom PCB in Altium, micro-ROS firmware on ESP32, YOLOv8 board tracking, and OpenAI Whisper voice input.
→
View Build