// 02 — Media
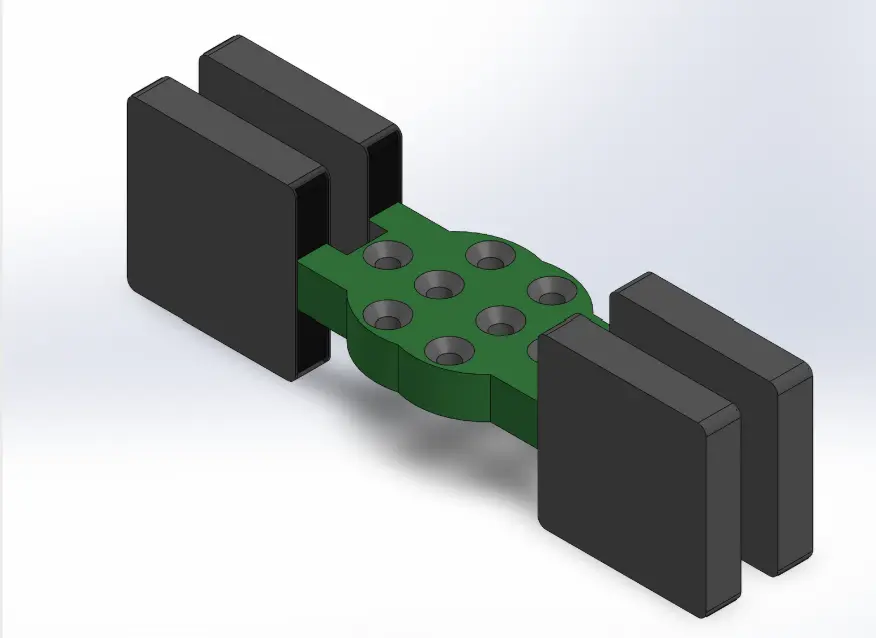
Designed and prototyped a 3D-printable water-faucet grip in SolidWorks for patients with low grip strength, following parametric design principles.
Manufactured using HDPE for waterproofing and durability. DFM principles were applied throughout, ultimately reducing the required grip strength by 83%.
The 83% grip strength reduction comes directly from the mechanical advantage created by extending the moment arm — the torque calculation behind that number is based on T = F × d, where doubling the moment arm halves the required force.
Printed with orientation chosen to avoid support material on functional surfaces, keeping tolerances loose enough to account for FDM's dimensional variability.
Too short and the mechanical advantage wasn't significant; too long and the lever would catch on surrounding pipes or be awkward to grip. Required careful iteration on geometry.
FDM prints are dimensionally inconsistent, so a friction fit that works on one print might be too loose or too tight on the next. Had to add tolerance offsets in SolidWorks and reprint multiple times.