// 02 — Gallery
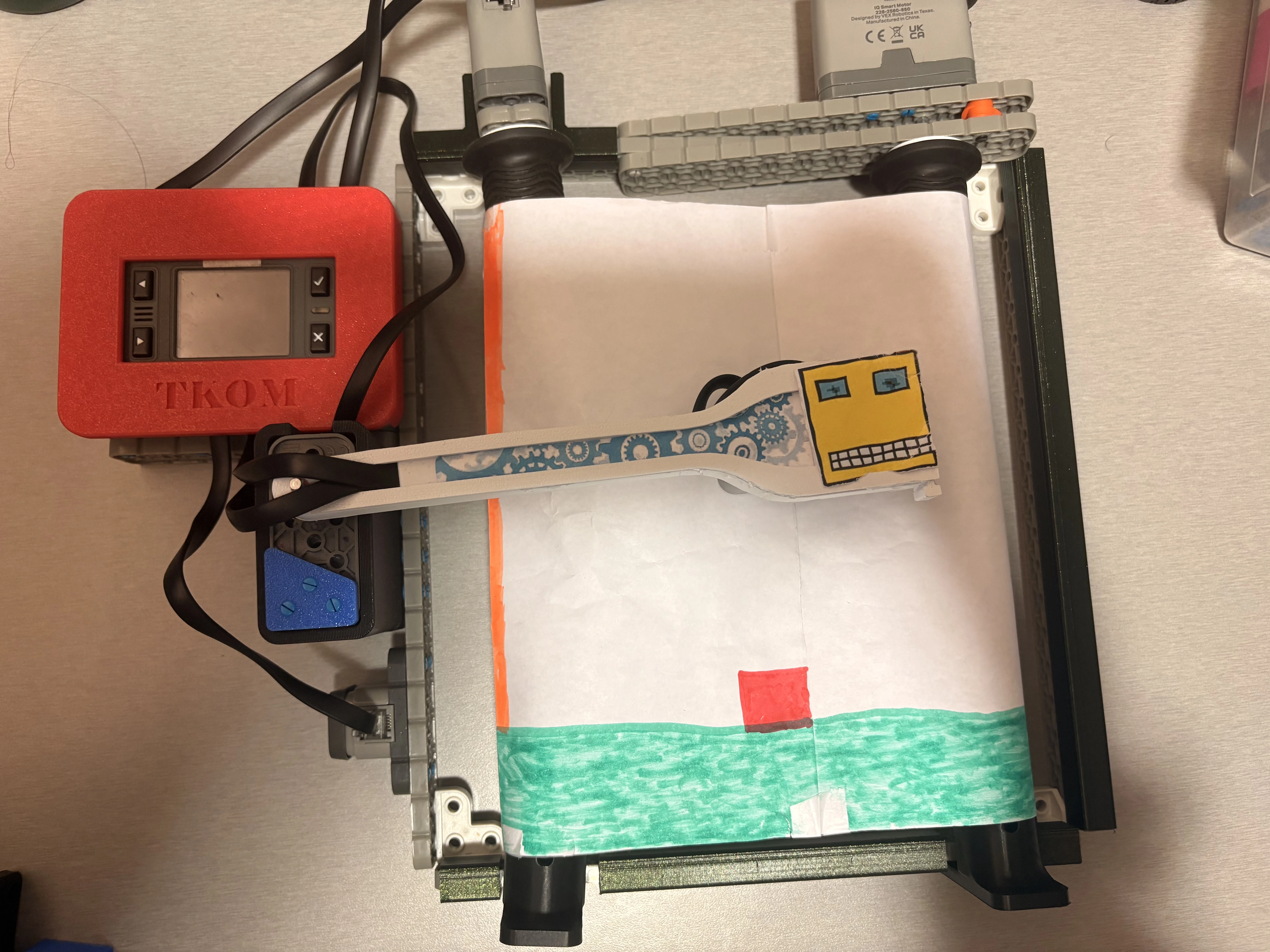
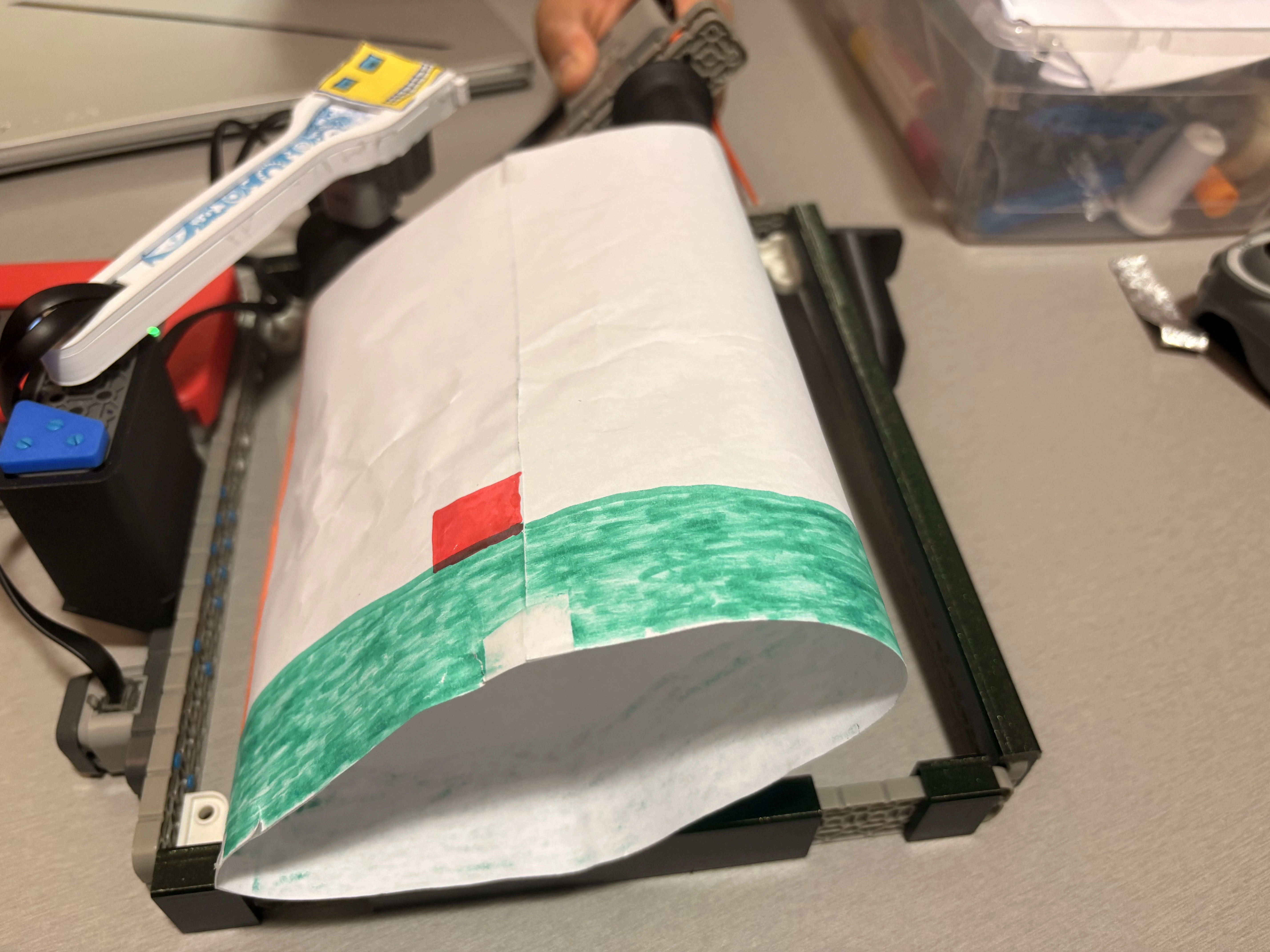


Engineered a robot that lets users insert custom hand-drawn images as maps for a personalised video game, paired with a 50+ page technical report.
Game logic including a gravity-based physics system and linear algebra calculations were implemented in C++. Hardware components including stabilisers, casings, and tensioners were designed in SolidWorks and 3D-printed on a Bambu P1S.
Created and implemented a full functional physics system using C++. Controls the player jumps and runs in a continuous Game Tick system.
Designed custom 3D parts including casings, tensioners, and stabilisers. Utilised SolidWorks for the CAD process and a Bambu P1S for 3D printing.
Physics logic was extremely hard to implement — sensors were from the VEX IQ kit, so a lot of debugging and state planning was needed to make sure it would work.
Sizes and tolerances for 3D printing ended up being inaccurate, and multiple iterations of the same part had to be designed and reprinted.