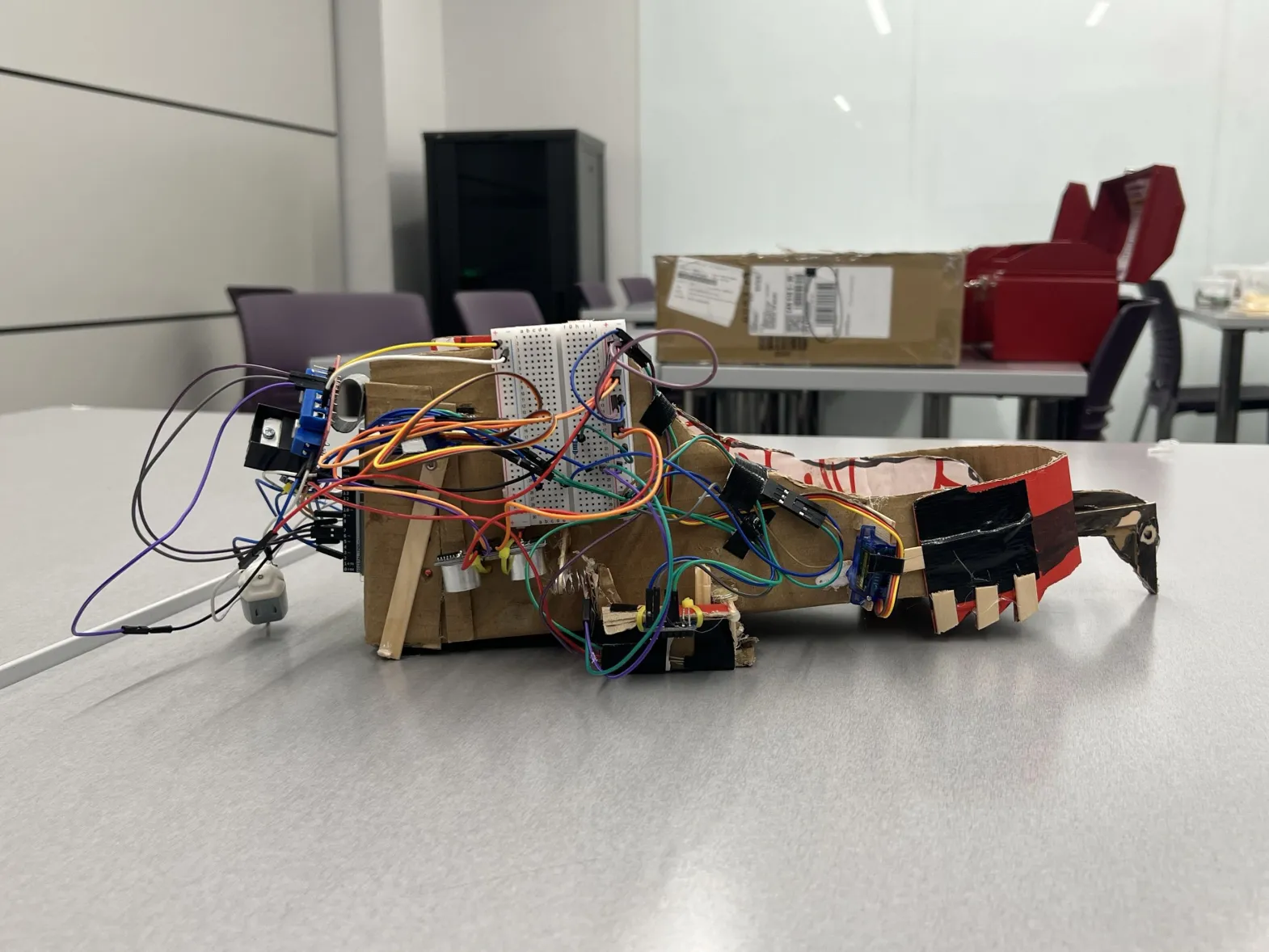
GOOTS (Goose Boots) is a shoe add-on designed for people with blindness, built in a team of four. The device integrates sensor fusion technology to classify the user's surroundings and provide haptic feedback based on environmental conditions.
By fusing data from a temperature sensor, FSR (Force Sensitive Resistor), ultrasound sensor, and RGB sensor, the system can identify surface materials — distinguishing between ice, snow, and other ground types — and trigger different alerts accordingly.
This project was done for the EngHacksW26 Hackathon in under 12 hours.
Sensor Fusion
Combined readings from 4 sensor types with different units and ranges into a single classification pipeline. Normalised each signal and defined threshold-based logic to classify the surface underfoot as ice, snow, or other in real time.
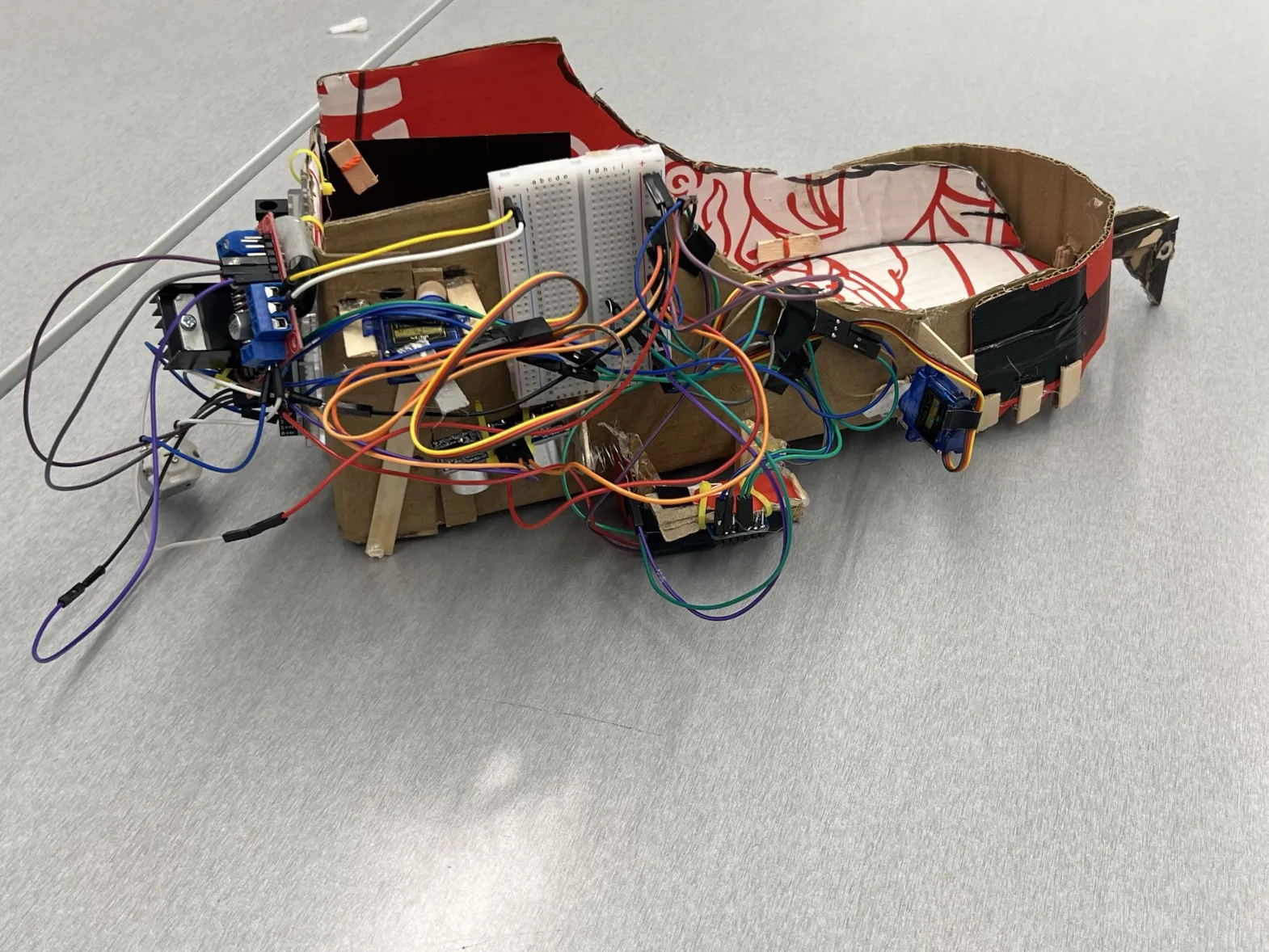
Multi-Protocol Sensor Integration
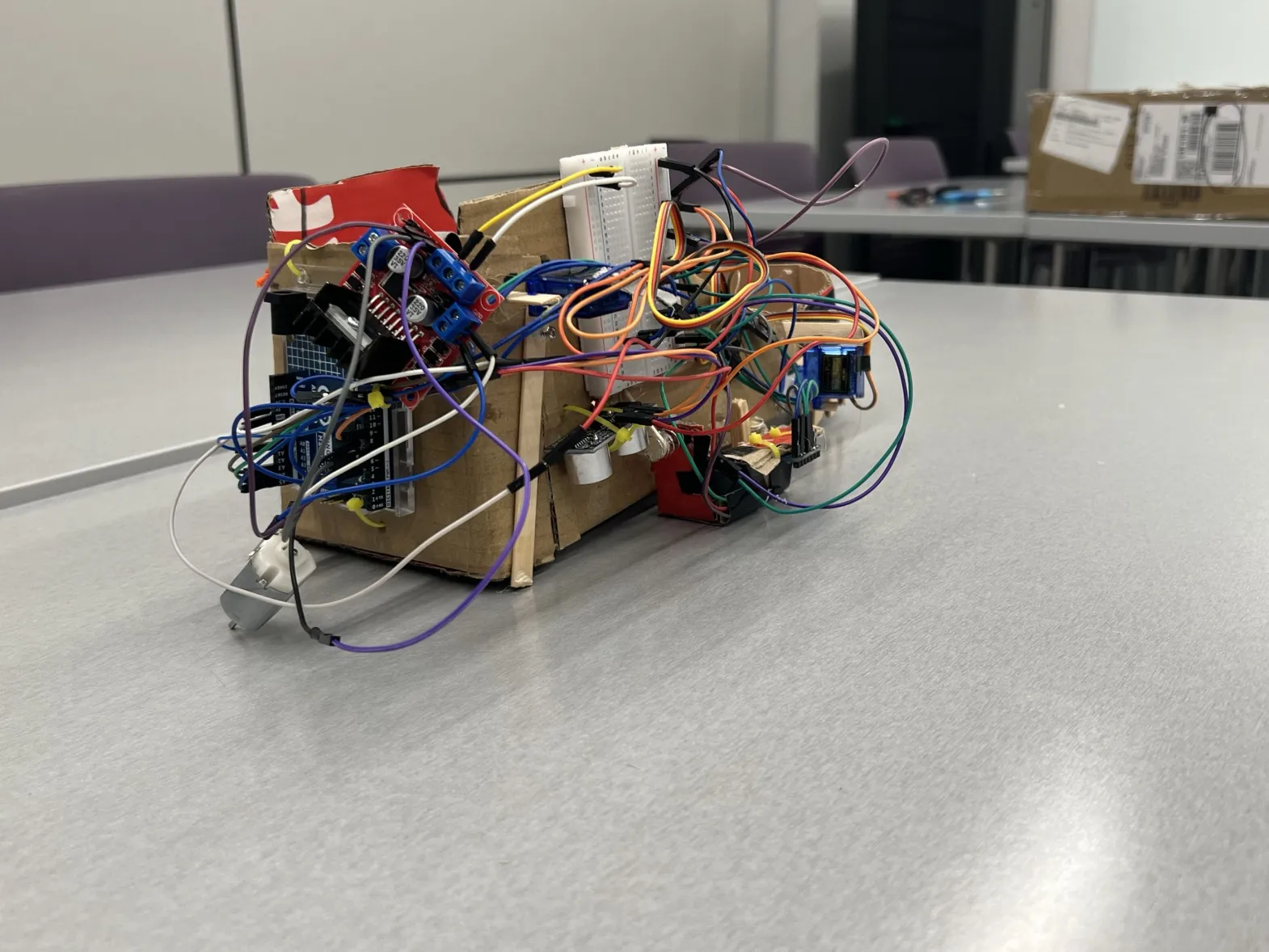
Interfaced temperature, FSR, ultrasound, and RGB sensors to a single Arduino, each using different communication protocols (analog, digital, I2C). Managed pin assignments, voltage levels, and sampling rates across all four simultaneously.
Raw sensor readings were noisy and inconsistent, especially the RGB which gave different outputs depending on the lighting. Had to implement averaging and debugging to get stable classifications.
Testing on actual ice and snow is weather-dependent — we had limited opportunities to validate on real surfaces, so a lot of early tuning was done on simulated conditions (ice packs, wet surfaces) which didn't fully replicate outdoor conditions.